Survey and Architecture Proposal
Downloads
DOI:
https://doi.org/10.7480/rius.1.203Published
Issue
Section
License
Copyright (c) 2008 Stefan Edelkamp, Damian Sulewski, Francisco C. Pereira, Hugo Costa

This work is licensed under a Creative Commons Attribution 4.0 International License.
How to Cite
Abstract
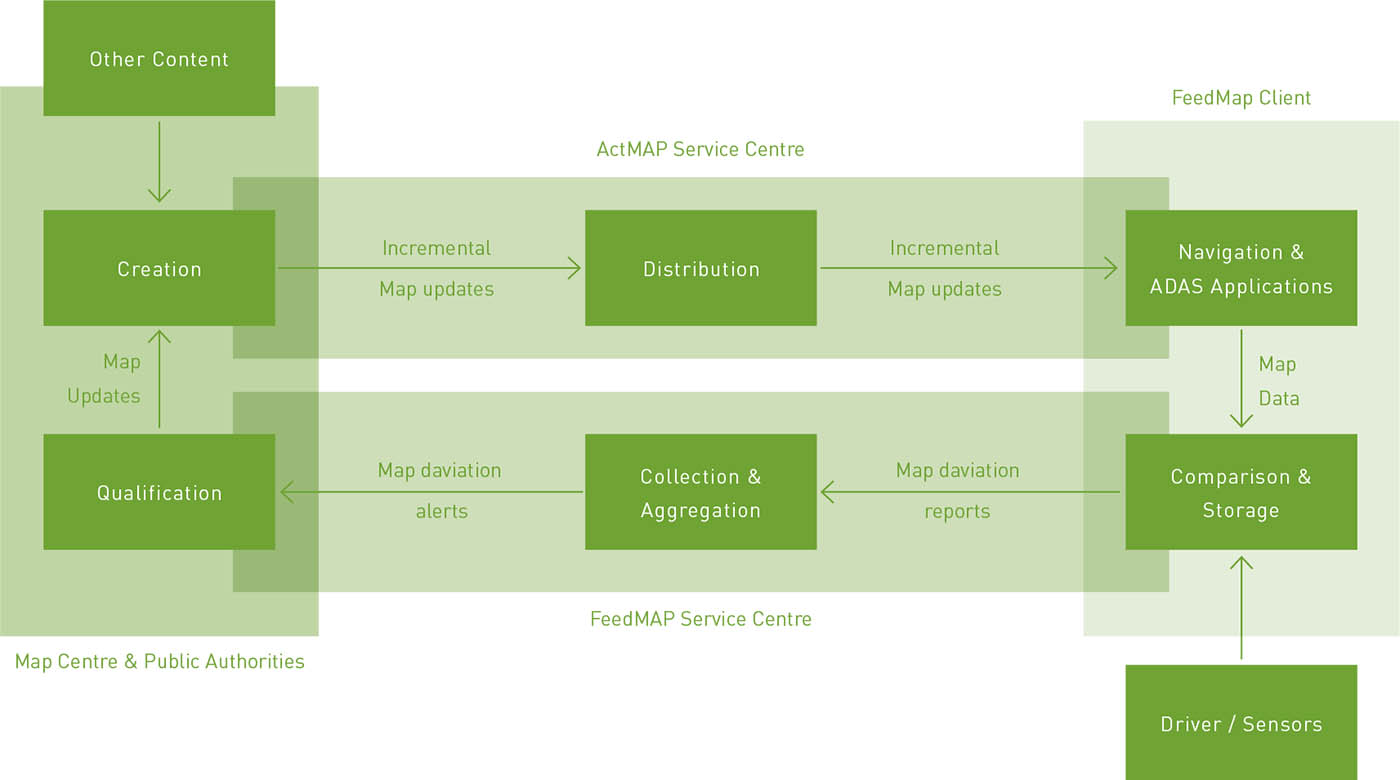
In this chapter, we intend to present the map making state-of-the-art and discuss current and future prospects for the development of an automated methodology for map aggregation that takes into account the need for integration of mobility data and the social networking trend, which we believe will eventually become the main source of geographical maps. This will allow us to abstract a general architecture for a Collaborative Map Generation System and discuss in some detail the technical challenges for each module (and its current solutions).
In doing so, we hope to show that as a very relevant and desirable ‘side effect’, a set of algorithms must be developed that will help with regard to those Transport and Urban management tasks referred to above. We address filtering, map matching, update and aggregation, steps for the construction of the maps, and some efficient algorithms and data structures that are used to compress, process and query the map once generated.
References
Bast, H., Funke, S., Sanders, P. and Schultes, D. (2007) Fast routing in road networks with transit nodes, Science Magazine, April 2007.
Bentley, J.L. and Ottmann, T.A. (1979) Algorithms for reporting and counting geometric intersections, Transactions on Computing, 28, pp. 643-647.
Berg, M., Kreveld, M van., Overmars, M. and Schwarzkopf, O. (1997) Computational Geometry, Algorithms and Applications, Springer Verlag, New York.
Blewitt, G. and Taylor, G. (2002) Geoffrey Blewitt and George Taylor. Mapping Dilution of Precision (MDOPI and map-matched GPS, International Journal of Geographical Information Science, 16(1): 55-67.
Brakatsoulas, S., Pfoser, D., Salas, R. and Wenk, C. (2005) On map-matching vehicle tracking data, Proceedings of the 31st international conference on Very large data bases (VLOB), Norway, 2005.
Brüntrup, R, Edelkamp, S., Jabbar, S., and Scholz, B. (2005) Incremental map generation with GPS traces, Proceedings of Intelligent Transportation Systems, IEEE Publications.
Chawathe, S. (2007) Segment-Based Map Matching, Intelligent Vehicles Symposium, 2007 IEEE, pp. 1190-1197.
Drodzyinski, M., Edelkamp, S., Gaubatz, A., Jabbar, S., and Liebe, M. (2007) On Constructing a Base Map for Collaborative Map Generation and its Application in Urban Mobility Planning, IEEE Conference on Intelligent Transportation Systems, IEEE Press, pp. 678-683.
Edelkamp, S., Jabbar, S. and Willhalm, T. (2005) Geometric travel planning, IEEE Transactions on Intelligent Transportation Systems, 6(1) ,5-16.
ERTICO (20071 ERTICO ITS Europe, http://www.ertico.com, accessed 23 July 2008.
Finkel, R. and Bentley, J.L. (1974) Quad trees, a data structure for retrieval on composite keys, Acta lnformatica 4(1), 1-9.
Flament, M. (20051 ACTMap Final Report, ERTICO, D 1.2. http://www.ertico.com/en/subprojects/actmap/public_documents/, accessed 23 July 2008.
Gerke, M., Heipke, Ch. and Busch, A. (2004) Automated image-based verification of road databases, Proceedings of 7th AGILE Conference on Geographic Information Science, 29 April - 1 May 2004, Heraklion, Greece.
Goldberg, D. (1989) Genetic Algorithms in Search, Optimization and Machine Learning, Kluwer Academic Publishers, Boston (Mass.).
Grejner-Brzezinska, D. (1995) Positioning Accuracy of the GPSvan, Proceedings of the 52nd Annual National Technical
Meeting of the Institute of Navigation, Palm Springs (California), pp. 657-665.
Jabbar, S. (2003) GPS-based navigation in static and dynamic environments, Master's thesis, Universitat Freiburg.
Krajewicz, D., Hartinger, D., Hertkorn, G., Mieth, P., Rossel, C., Zimmer, J., and Wagner, P. (2003) Using the road traffic simulation (SUMO) for educational purposes. In, S.P. Hoogendoorn, S. Luding, P.H.L. Bovy, M. Schreckenberg and D.E. Wolf, eds, Traffic and Granular Flow (TGF) 2003, Springer, Berlin Heidelberg.
Marchal, F., Hackney, J. and Axhausen, KW. (2005] Efficient map-matching of large GPS data sets - Tests on a speed monitoring experiment in Zurich, TRB annual meeting, Washington D.C., January 2005. OpenStreetMap (2007) OpenStreetMap website. http://www.openstreetmap.org/ as of April 2007.
Otto, H., Beuk, L., Aleksic, M., Meier, J., Loewenau, J., Flament, M., Guarise, A., Bracht, A., Capra, L., Bruns, K. and Sabel, H. (2004) ACTMap Specification, ERTICO. http://www.ertico.com/en/subpro1ects/actmap/public_documents/
Refan, M.H. and Mohammadi, K. [2001 l Point averaging of the position components, before and after S/A is turned off, Asian GPS Conference, India.
Scholz, B. [2006] Automatic inference of street maps based on GPS traces. Master's thesis (in German), Universitat Dortmund, Germany.
Schroedl, S., Wagstaff, K., Rogers, S., Langley, P. and Wilson, C. (2004) Mining GPS Traces for Map Refinement, Knowledge
Discovery and Data Mining, 9: 59-87.
Voronoi, G. (1907) Nouvelles applications des parametres continus a la theorie des formes quadratiques, Journal fur die
Reine und Angewandte Mathematik, 133, 97-178.
Wadhwani, A. (2001) Recent advances in mobile GPS/GIS mapping technology. In, MAP India 2001. GIS Development
Newsletter, gisdevelopment.net.
Yun, L., Uchimura, K. and Wakisaka, S. (2004) Automatic Extraction of main road from lkonos satellite imagery based on fuzzy reasoning, Proceedings of the 8th International Conference on Applications of Advanced Technologies in Transportation, no.
, (CD-ROM), Beijing, 26-28 May 2004, pp. 641-646.

